Delta X 1 Luxury Kit¶
Cost: 549$ (No Frame) / 649$ (With Hyper Cube Frame)¶
Purchase Now¶

Components¶
Delta X 1 Luxury Kit is full of end effectors. This will be an interesting desktop robot to play and research for robot lovers. The kit includes:
- Delta X 1 Robot
- Axis 4
- Pen holder & Touch pen
- Gripper Kits
- Pneumatic Kits
- Laser Module
- 3D Printing Kit (Extruder Stepper, Hot End kit, teflon tub)
- Power supply (12VDC 5A)
- USB cable
- Hyper Cube frame (optional)
Basic Parameters¶
| Parameters | Specifications |
|---|---|
| Working space | D = 340 mm, H = 200mm |
| Max payload | 500g |
| Max speed | 700 mm/s |
| Pose repeatability | ±0.1 mm |
| Position accuracy | ±0.15 mm |
| Number of axes | 3/4 |
| Power supply | 12VDC - 5A |
| Weight | 4kg |
Electrical Parameters¶
| Components | Specifications |
|---|---|
| Controller Board | Arduino Mega 2560, RAMPS 1.4 |
| Communication | USB, UART, Bluetooth, Wifi |
| Input | 1 analog input(temp sensor) |
| Output | Stepper/Laser/Vacuum/Axis-4/Gripper) |
Mechanical materials¶
| Part | Materials |
|---|---|
| Upper Arm | 3D printed (PLA) |
| Lower Arm | Carbon fibre tube |
| Base frame | Aluminum profile |
| Moving base | 3D printed (PLA) |
| Body cover | 3D printed (PLA) |
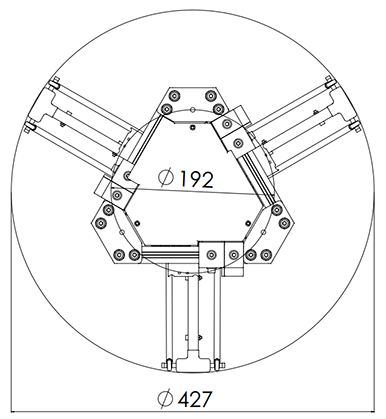
Working Space¶
Reach¶
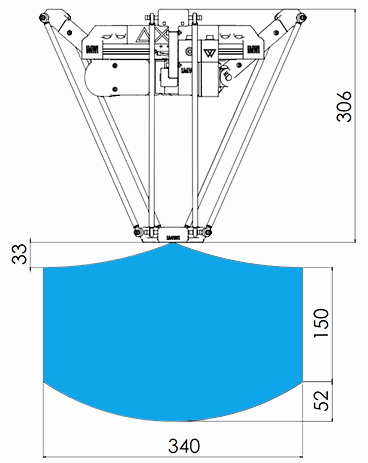
Safe Working Area¶
Contact Us¶
- Store: https://deltaxstore.com
- Website: https://www.deltaxrobot.com
- Email: deltaxrobot@gmail.com
- Phone: +84 38 875 2005