Delta X 2 Specifications¶
Basic Parameters¶
| Parameters | Specifications |
|---|---|
| Working space | D = 320 mm, H = 200mm |
| Max payload | 700g |
| Max speed | 800 mm/s |
| Max accel | 20000 mm/s2 |
| Pose repeatability | ±0.15 mm |
| Position accuracy | ±0.15 mm |
| Number of axes | 3/4 |
| Power supply | 12VDC - 5A |
| Weight | 4kg |
Electrical Parameters¶
| Components | Specifications |
|---|---|
| Controller Board | Delta X 2 Board (ARM Cortex-M3 |
| Communication | USB, UART, Bluetooth, Wifi |
| Input | 1 analog input(temp sensor) |
| Output | Stepper/Laser/Vacuum/Axis-4/Gripper) |
Mechanical materials¶
| Part | Materials |
|---|---|
| Upper Arm | Aluminum plate |
| Lower Arm | Carbon fibre tube |
| Base frame | Aluminum profile |
| Moving base | Aluminum |
| Motor mounted | Aluminum |
| Body cover | 3D printed (PLA) |
Robot Dimensions¶
Working Space¶
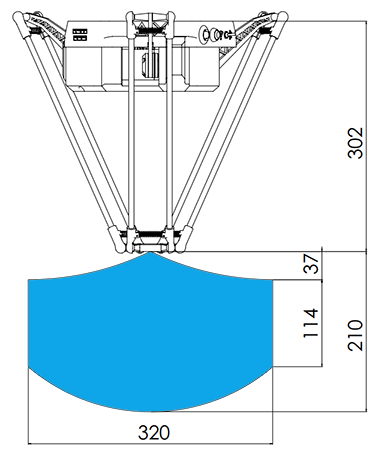
Safe Working Area¶
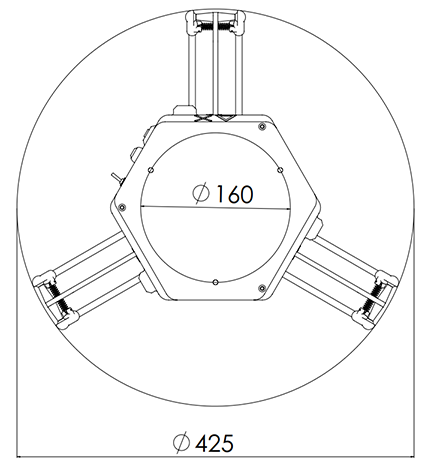
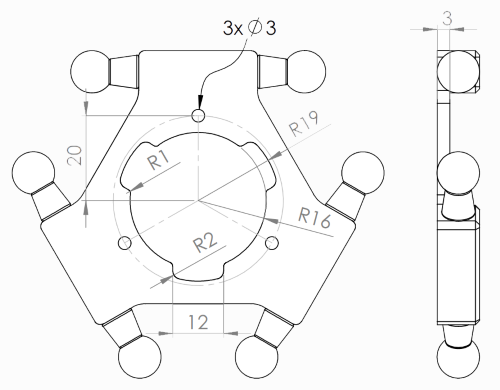
Moving Base Dimensions¶
Wiring and Pinout¶
Pinout¶
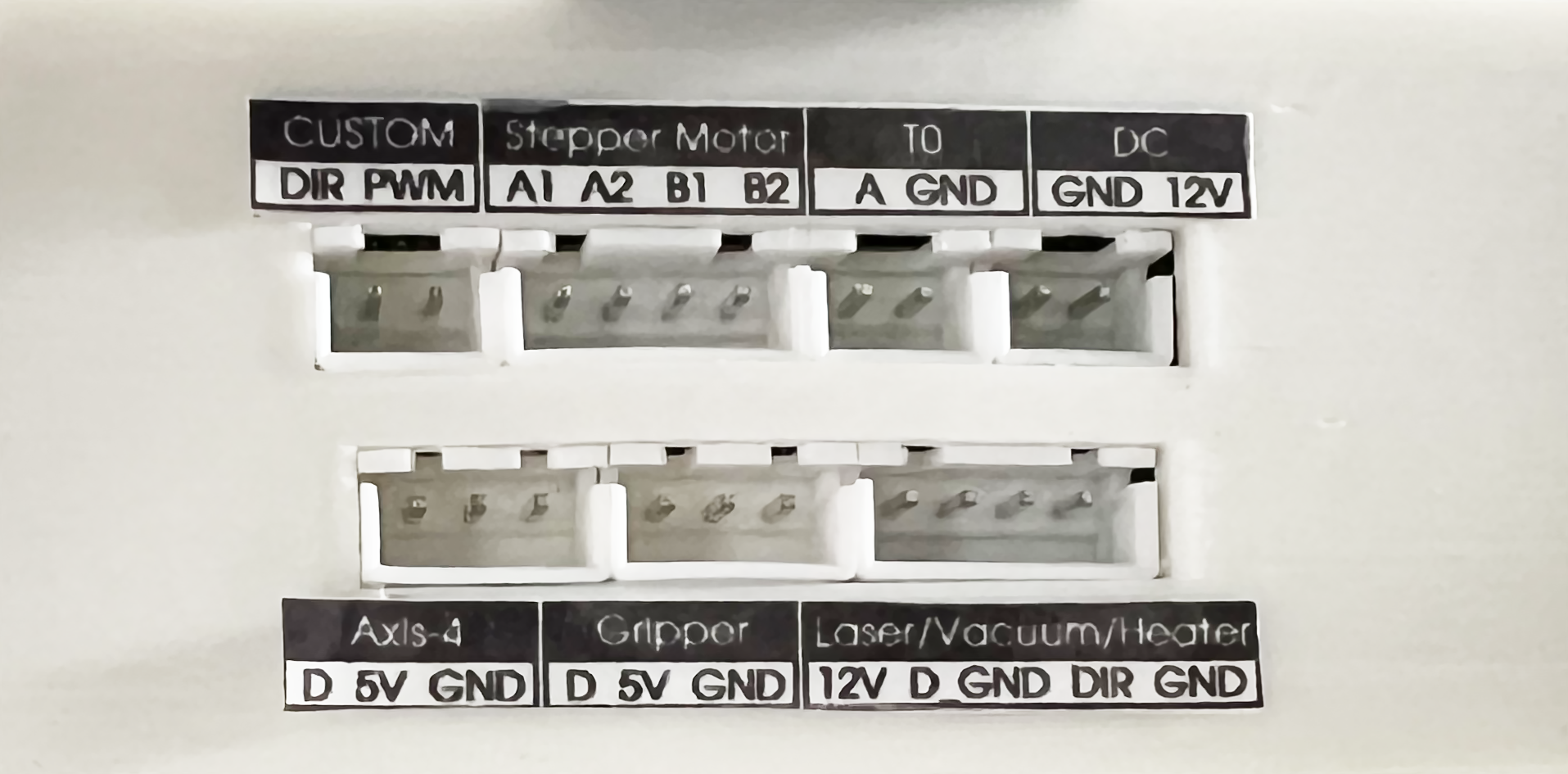
Delta X 2 Robot has multiple port for different end effectors. The port is located on a side of robot body. Includes:
- 1 Laser/Vacuum/Heating Port
- 1 Gripper Port
- Axis 4 Port
- 1 Stepper Motor Port for 3D Printing
- 1 Thermistor Port
- 12VDC Power Supply Port
- 1 Custom Port
Communication Ports and Power Supply¶
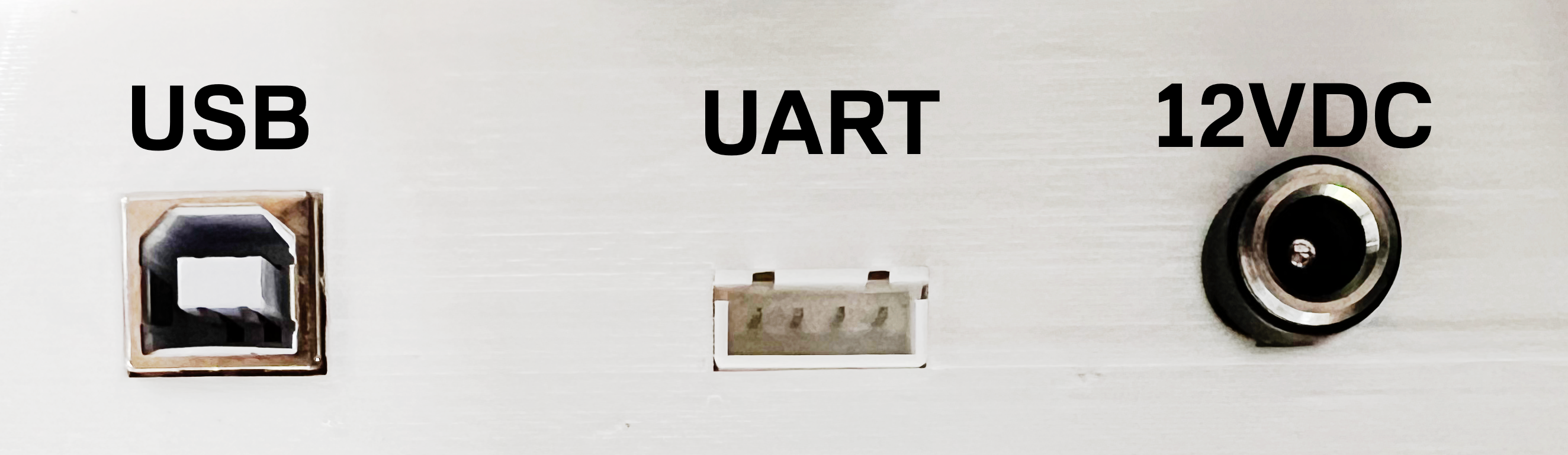
The robot has a USB-B port and a UART port for communication. The USB-B port is used for programming and debugging. The UART port is used for communication with other devices. The robot can be powered by a 12VDC power supply with minimum 5A current.
Contact Us¶
- Store: https://deltaxstore.com
- Website: https://www.deltaxrobot.com
- Email: deltaxrobot@gmail.com
- Phone: +84 38 875 2005