Slider X Specifications¶
Slider X is used when you need to open the range of the robot’s working space. It can be used with Delta X 1, Delta X 2.
Basic Parameters¶
| Parameters | Specifications |
|---|---|
| Working space | 300mm |
| Max payload | 8kg |
| Max speed | 80 mm/s |
| Max accel | 900 mm/s2 |
| Position Accuracy | ±0.1 mm |
| Power Supply | 12VDC/3A |
| Weight | 2 kg |
| Communication | UART |
| Control Method | g-code |
Mechanical materials¶
| Part | Materials |
|---|---|
| Body | Aluminum |
| Linear Motion Method | V-Wheel |
| Belts | GT2 |
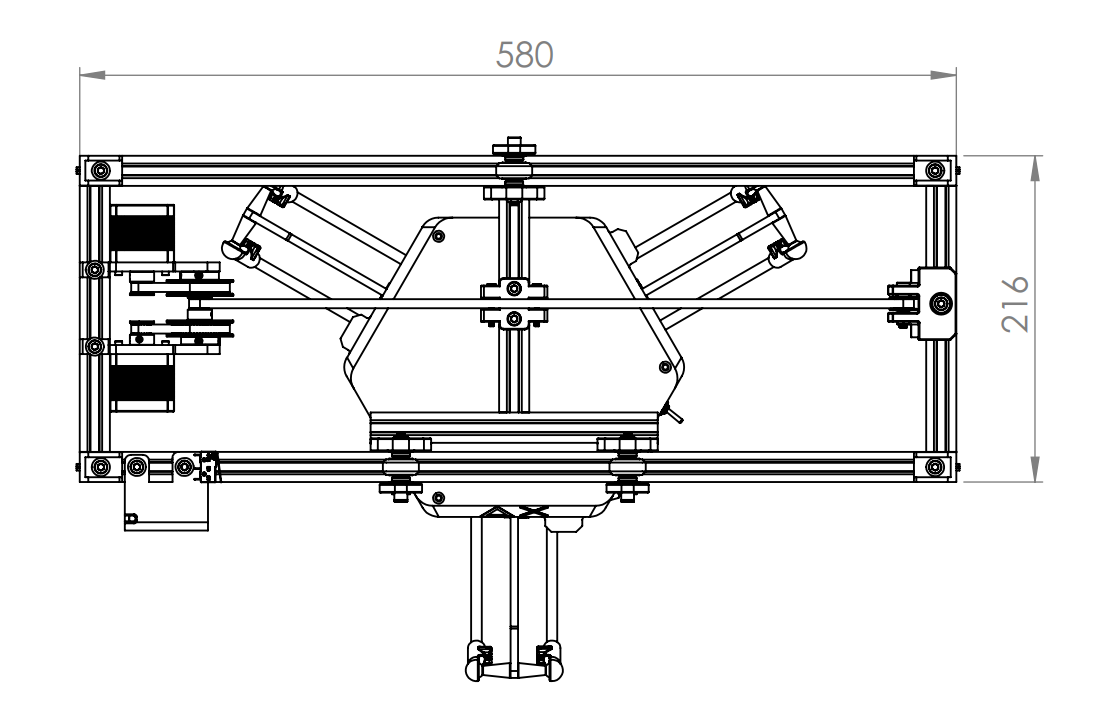
Dimensions¶
Applications¶
Slider X is exceptionally well-suited for diverse applications, including: experimental projects, small-scale lab endeavors, and more.
Contact Us¶
- Store: https://deltaxstore.com
- Website: https://www.deltaxrobot.com
- Email: deltaxrobot@gmail.com
- Phone: +84 38 875 2005